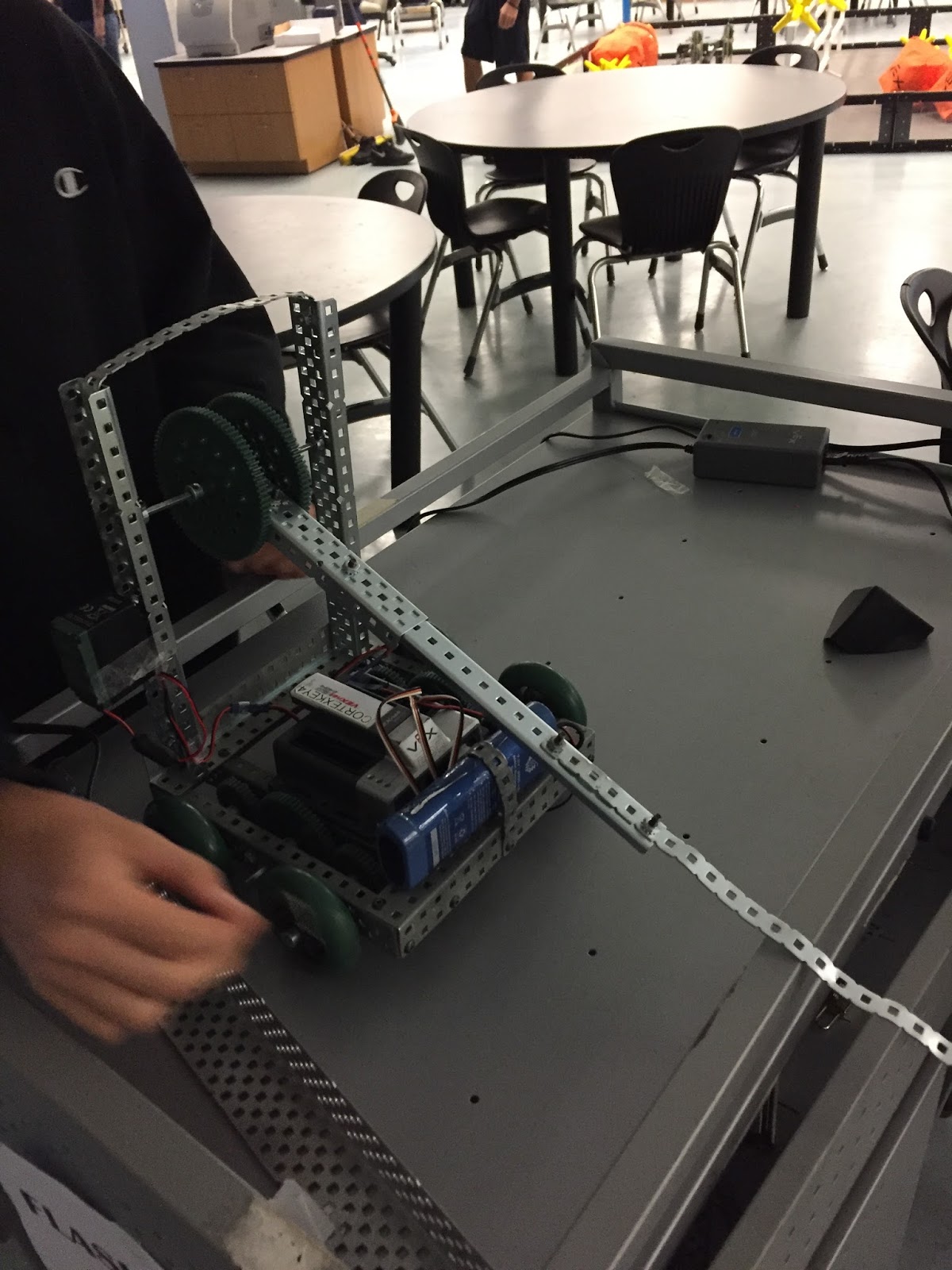
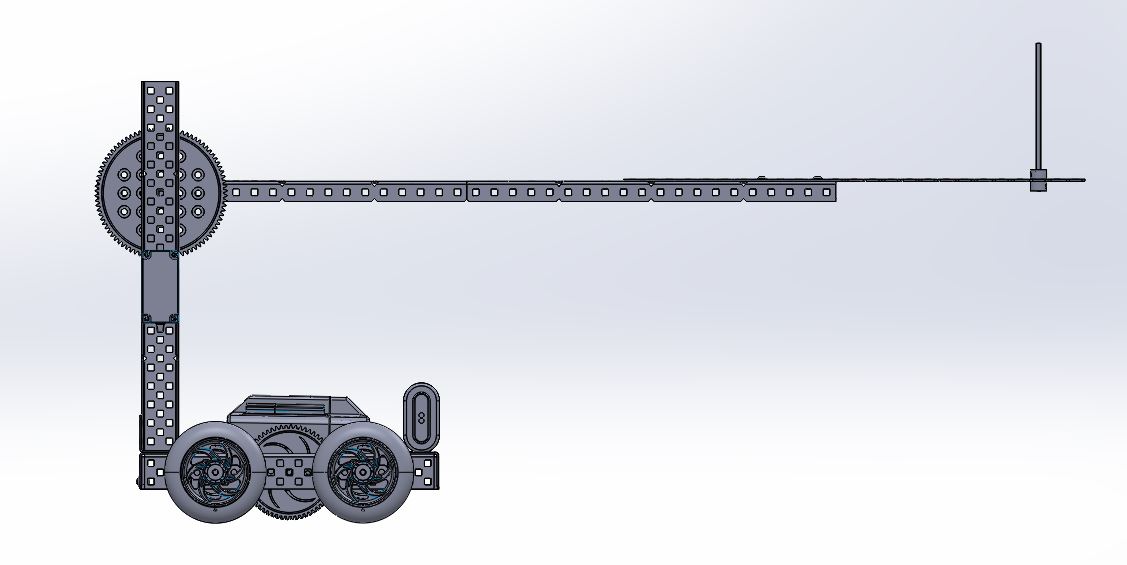
Today we completed the addition of our two new gears. The gears are now able to successfully compensate for the previously overbearing weight of the robot's arm. We also began SolidWorks, in SolidWorks we added the foundation for the arm and by tomorrow we should have successfully added all of the gears, collars, and metal components used for the arm (channels, angles, etc.)