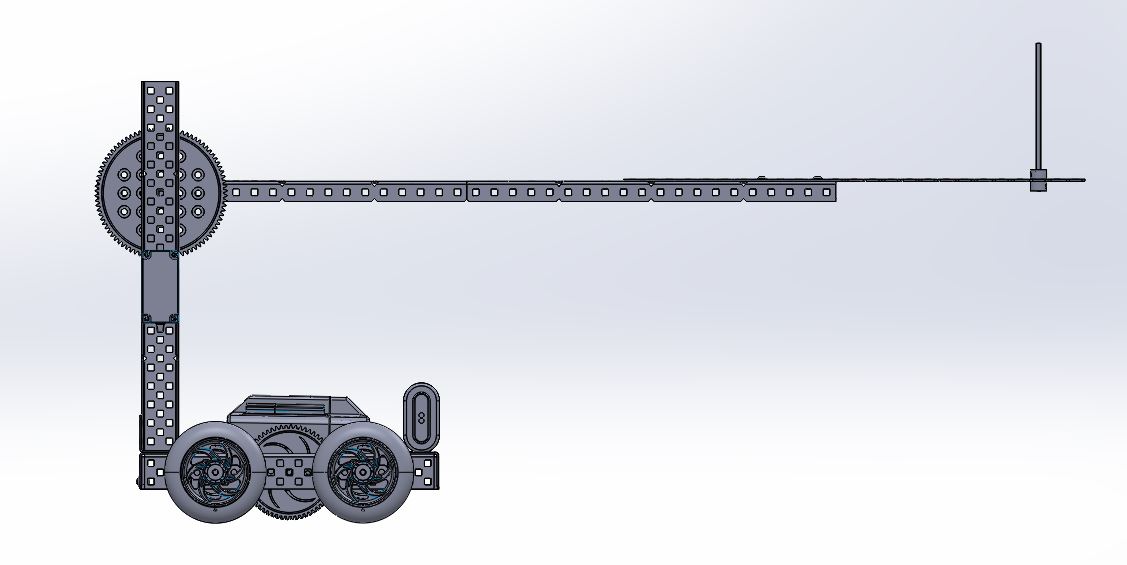
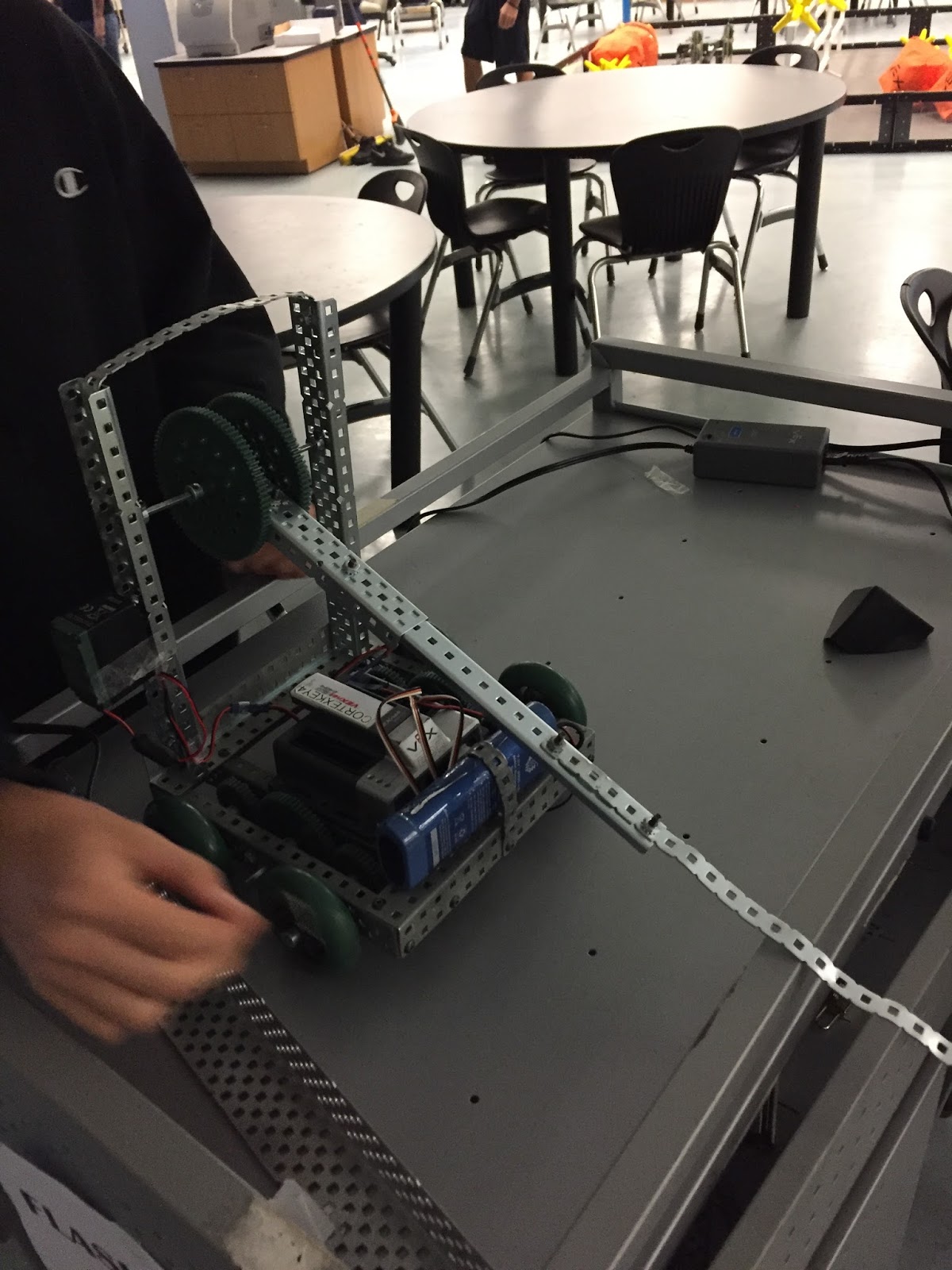
Our robot has been giving us a few issues, and I've scientifically deduced that the cause of it is a Halloween curse. Our arm isn't long enough to reach the top of the array of pipes, a few screws popped off the robot, and the arm is moving with too much power, so we have to tone it down. Thankfully, all of these issues have simple solutions. We just have to make the arm longer, tighten the screws, and lower the amount of power on the arm's motor.